Возникла проблема - не sailfish_app приложение, просто Qt5 необходимо, при сборке пакета автоматически обновлять qm файлы перевода.

Итак, в прошлой части мы настроили сервисы камеры со стороны андройд части, пора, наверное прикрутить к ним UI часть сейлфиша!

Если вывалилась ошибка:
Код BASH:
Решается созданием пустого файла
Код BASH:
Команда для конфига
Код BASH:

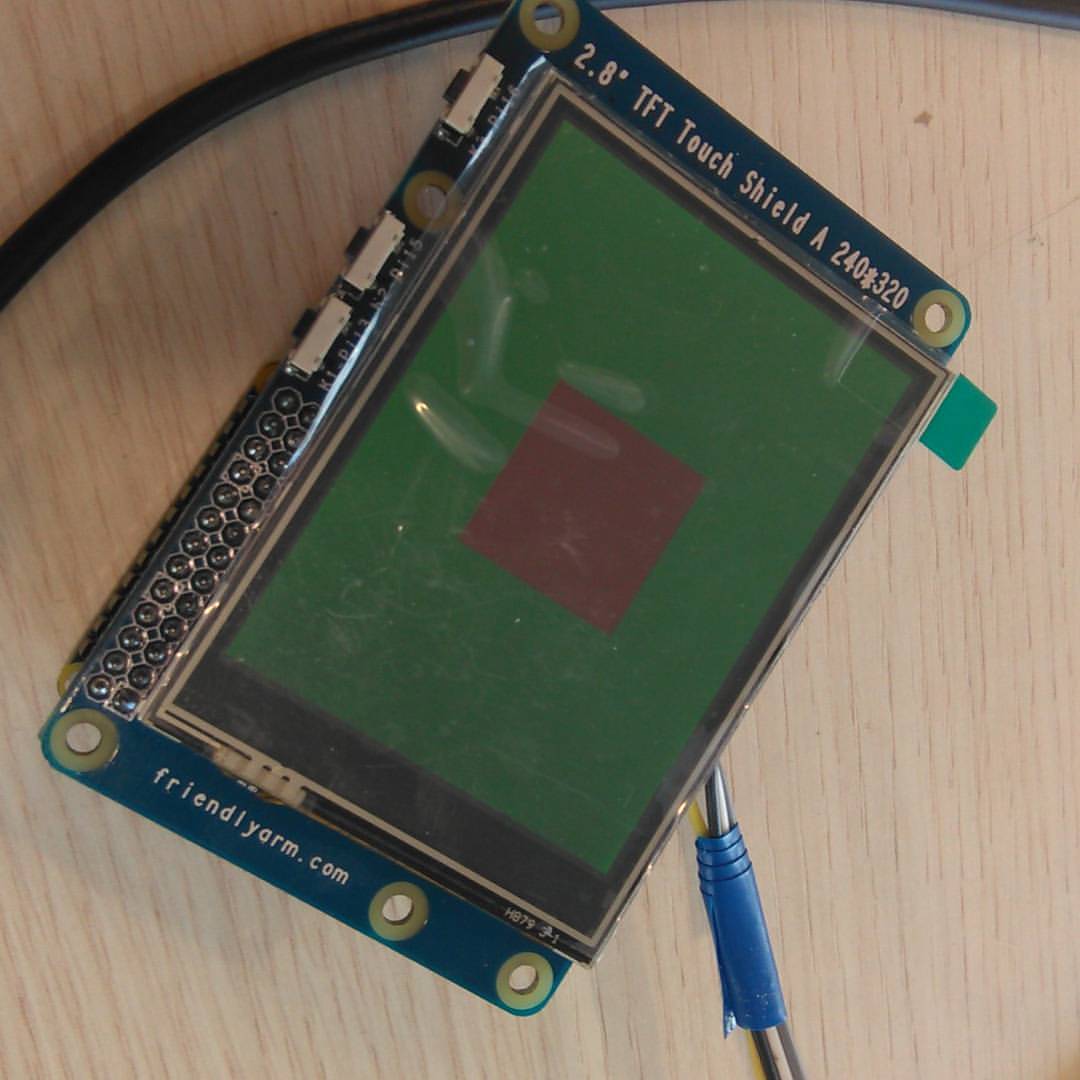
Итак, продолжаем работу с жедезкой FriendlyARM NanoPI к которой я прикручиваю всякие весёлости. На данный момент у нас очень хорошо работает ядро, графика через фреймбуфер о ней мы сейчас и поговорим. Как это связано с древом устройств поймёте практически сразу :)

Всё работает через SPI экранчик, через qtdeclarative-render2d
Код BASH:
Результат:
Возникла тут весёлая задачка, есть планшет, в нём есть модем в котором есть поддержка голосовых звонков аппаратно в чипе, но они не выведены наружу...

При попытке звонка происходят очень весёлые весчи...
При попытке звонка происходят очень весёлые весчи...
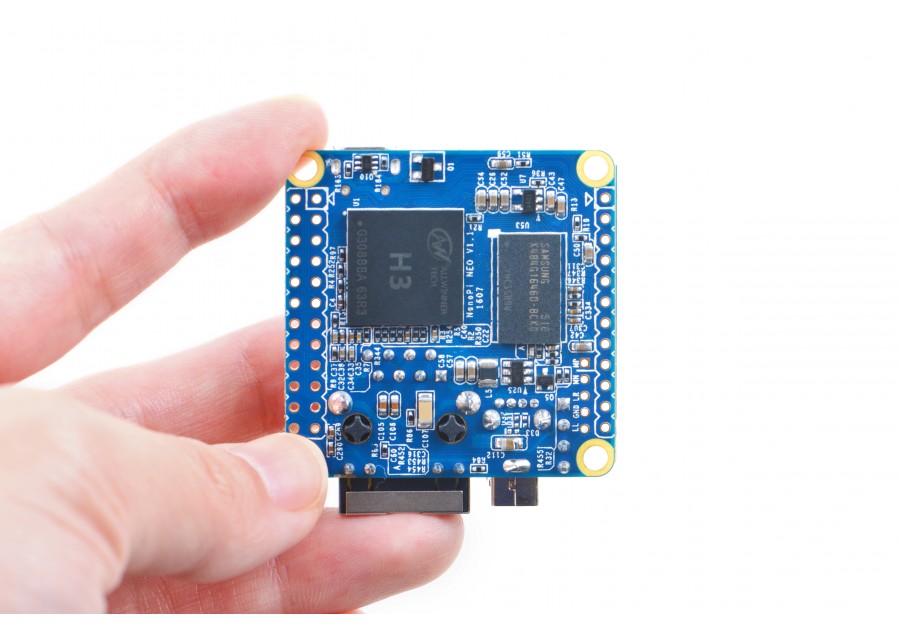
Заказал себе ещё пару железок от friendlyarm.
NanoPi NEO - за 10 бакинских. Долго ходил вокруг неё..не знал куда применить - теперь нашёл Но пока не расскажу.
Но пока не расскажу.
Ну и екранчик к ней...

И да, надо бы вернуться к ритму публикации - раз в пару дней.
NanoPi NEO - за 10 бакинских. Долго ходил вокруг неё..не знал куда применить - теперь нашёл
Но пока не расскажу.Ну и екранчик к ней...
И да, надо бы вернуться к ритму публикации - раз в пару дней.
Симптомы: Устройство подключается к мобильной сети, но передача данных не работает.


 Sailfish HADK
Sailfish HADK  Кактусы
Кактусы